





")

Participation in Industry 4.0 Summit and Expo 2018
Industry 4.0 Summit and Expo 2018 is a large-scale international event hosted by the Vietnamese Government and the Central Economic Commission, with the consent of the Standing Secretariat, the Prime Minister and the Head of the Central Economic Commission. The event focuses on discussing the current status of the deployment and application of the Industry 4.0 in Vietnam, the role of policymakers in formulating a proactive approach to Industry 4.0 and international co-operation as well as proposing solutions and options to optimize breakthrough technologies in all socio-economic fields.
Nomination of Prof. Eric Castelli as join member
As part of his visit to MICA, it is our honor to nominate Prof. Eric Castelli as a join member. His rich experience on Vietnamese environment after a long period working in MICA would be a great start for future results and success.
MICA participation in AI4Life Conference
AI4Life Conference is an international forum for practitioners and researchers among Academia, Industry, and Government to present novel research results in Artificial Intelligence, to communicate and exchange innovative ideas, as well as to discuss potential applications. The conference aims to raise the public awareness on the recent advances and emergence of Artificial Intelligence in every aspect of our life.
Official visiting delegation from University of La Rochelle to MICA
Prof. Jean-Marc Ogier, President of University of La Rochelle, France, and his colleagues have made an official visit to MICA. During this visit, both sides have warmed up the collaboration with introduction of their recent activities as well as discussion about further opportunities.
Le Département Speech Communication de l'Institut MICA leader d'un nouveau projet sur les langues minoritaires du Vietnam
Complete title: Research for developing an automatic translation system for Vietnamese text to Muong speech, with further application to other unwritten languages in Vietnam
Soutenance de thèse de Mme DOAN Thi Huong Giang
Mme DOAN Thi Huong Giang, doctorante de l’Institut MICA, a brillamment soutenu sa thèse à Hanoi le 11 juillet 2017, et a ainsi obtenu le titre de Docteur en Sciences, spécialité Control Engineering and Automation

The 3rd International Conference on Multimedia Analysis and Pattern Recognition (MAPR 2020)
| After the success of the 2nd MAPR 2019, we are pleased to announce third International Conference on Multimedia Analysis and Pattern Recognition (MAPR) supported by VAPR (Vietnamese Association on Pattern Recognition) will be held in Ha Noi and Ninh Binh on Oct 8-9, 2020, where MICA will serve as a host. The aim of this conference is to bring together researchers and practitioners from both academia and industry for sharing their latest research findings, experimental results and consolidating potential collaborations on pattern recognition, multimedia analysis and related areas. |
MICA organizes the 1st Vietnamese seminar on minority languages
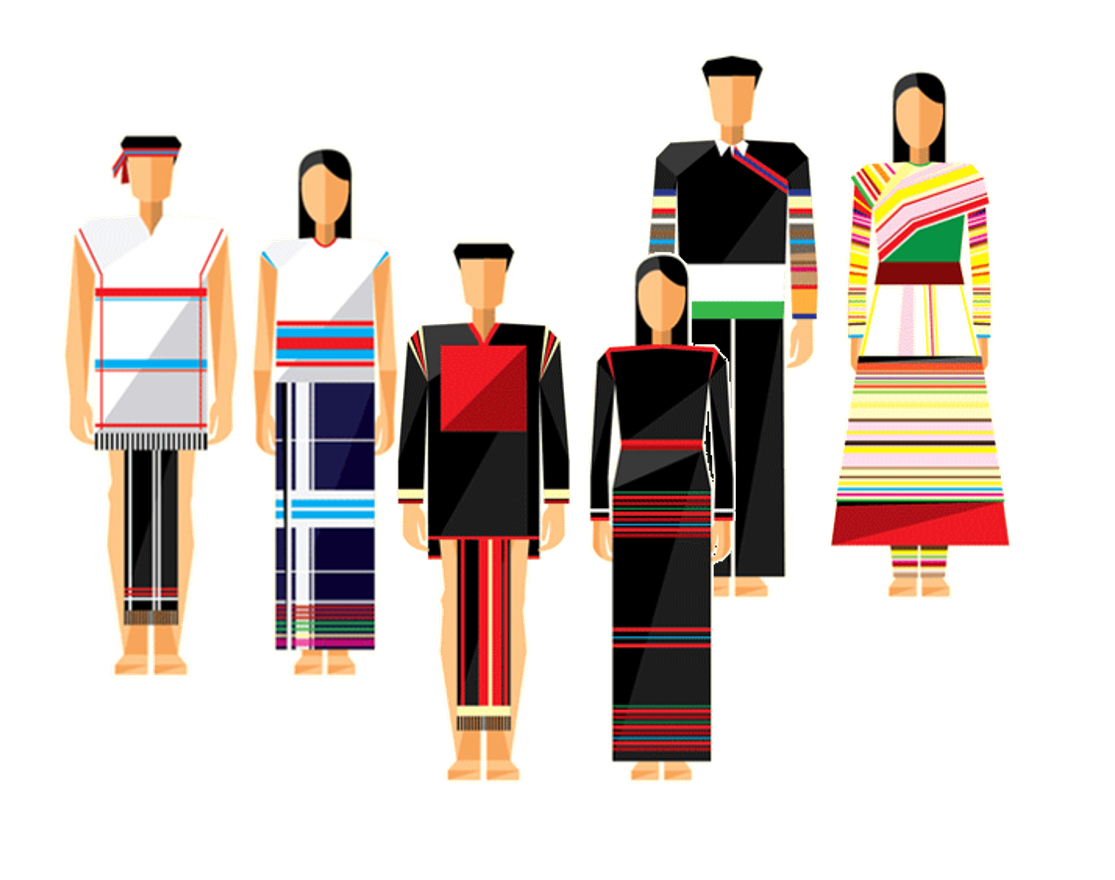 |
A seminar on ethnic minority languages in Vietnam, jointly organised with the Vietnam Institut of Linguistics, October 26th, 2017. |
MICA participe au 7ème workshop annuel du Groupement AURA
 |
Le workshop a été organisé à Tokyo et Tsukuba (Japon) les 3, 4 et 5 octobre 2017 |
Conférence grand public à l'Institut Français de Phnom Penh
 |
Le 26 septembre 2017 à 18h00, Prof Eric Castelli a présenté une conférence sur les technologies vocales à l'Institut Français de Phnom Penh, Cambodge |
L'Institut MICA de nouveau récompensé
 |
Le Ministère de l'Education et de la Formation du Vietnam reconnait l'excellence des travaux des chercheurs de l'Institut MICA |
L'Institut MICA membre de la French Tech Vietnam
 |
L'Institut MICA membre de la French Tech Vietnam depuis le mois d'août 2016 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Smartphone-based indoor positioning using Wi-Fi, inertial sensors and Bluetooth
Séminaire de TA Viet Cuong, doctorant de l'Institut MICA - Date : mercredi 22 novembre 2017, 09h00 - Lieu : "seminar room", Institut MICA, Hanoi University of Science and Technology
Some general features of the ethnic minority languages and scripts in Vietnam
Séminaire de Assoc. Prof. Huu-Hoanh Nguyen, Vietnam Institute of Linguistics - Date : jeudi 26 octobre 2017, 10h15 - Lieu : "seminar room", Institut MICA, Hanoi University of Science and Technology
About the Institute of Linguistics of Vietnam
Séminaire de Prof Van-Hiep Nguyen, Institut de Linguistique du Vietnam - Date : jeudi 26 octobre 2017, 09h30 - Lieu : "seminar room", Institut MICA, Hanoi University of Science and Technology
Remote laboratories
Séminaire de Dr. Ian Gout de l'Université de Limerick, Irelande - Date : jeudi 18 mai 2017, 15h00 - Lieu : salle "seminar", Institut MICA, Hanoi University of Science and Technology
Dynamic hand gesture recognition using RGB-D images for Human-Machine Interaction
Séminaire de Mme Doan Thi Huong Giang, doctorante de l'Institut MICA - Date : le 27 avril 2017, 14h00 - Lieu : seminar room, Institut MICA, Hanoi University of Science and Technology
3D mesh analysis and Cultural Heritage
Séminaire de Pr Romain Raffin, Laboratoire LSIS/G-Mod, Université d'Aix-Marseille, Arles. Date : mardi 14 mars 2017, 15h00. Lieu : salle séminaire, Institut MICA, Hanoi University of Science and Technology